I2C Peripheral
1. ST
ST STM32F10X:
MCU: ARM Cortex-M3 * 1, 32 bit.
1.1 i2c 功能描述
I2C模块接收和发送数据,并将数据从串行转换成并行,或并行转换成串行。可以开启或禁止中断。接口通过数据引脚(SDA)和时钟引脚(SCL)连接到I2C总线。允许连接到标准模式(100kHz)或快速模式(400kHz)的I2C总线。提供对SMBus 2.0的兼容。
1.2 模式选择
接口可以下述4种模式中的一种运行:
- 从发送器模式
- 从接收器模式
- 主发送器模式
- 主接收器模式
该模块默认地工作于从模式。接口在生成起始条件后自动地从从模式切换到主模式;当仲裁丢失或产生停止信号时,则从主模式切换到从模式。允许多主机功能。
通信流
主模式时,I2C接口启动数据传输并产生时钟信号。串行数据传输总是以起始条件开始并以停止条件结束。起始条件和停止条件都是在主模式下由软件控制产生。
从模式时,I2C接口能识别它自己的地址(7位或10位)和广播呼叫地址。软件能够控制开启或禁止广播呼叫地址的识别。
数据和地址按8位/字节进行传输,高位在前。跟在起始条件后的1或2个字节是地址(7位模式为1个字节,10位模式为2个字节)。地址只在主模式发送。
在一个字节传输的8个时钟后的第9个时钟期间,接收器必须回送一个应答位(ACK)给发送器。
1.3 i2c 从模式
默认情况下,I2C接口总是工作在从模式。在从模式下TRA位指示当前是处于接收器模式还是发送器模式。
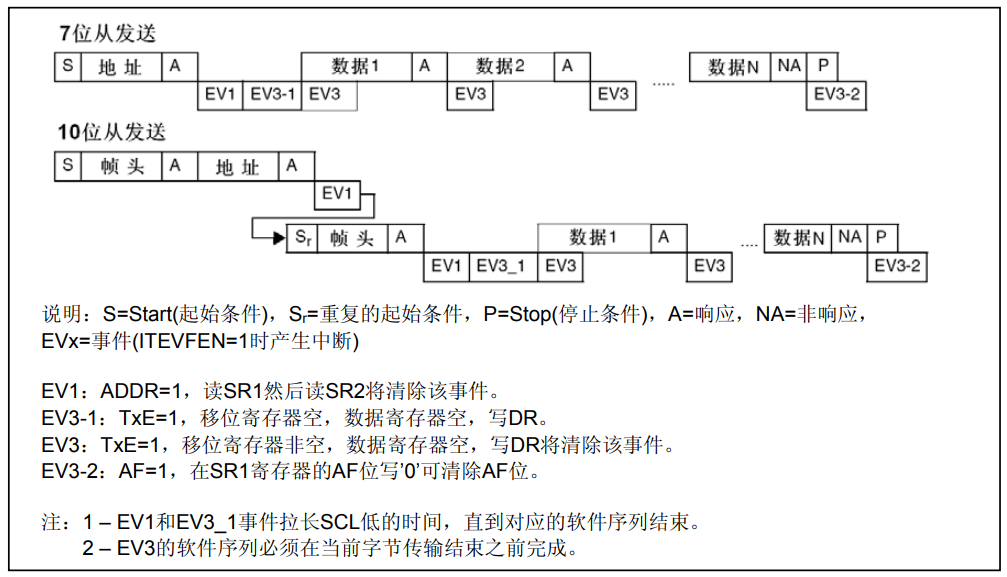
1.3.1 从发送器
在接收到地址和清除ADDR位后,从发送器将字节从DR寄存器经由内部移位寄存器发送到SDA线上。
从设备保持SCL为低电平,直到ADDR位被清除并且待发送数据已写入DR寄存器。
当收到应答脉冲时:
- TxE位被硬件置位,如果设置了ITEVFEN和ITBUFEN位,则产生一个中断。
如果TxE位被置位,但在下一个数据发送结束之前没有新数据写入到I2C_DR寄存器,则BTF位被置位,在清除BTF之前I2C接口将保持SCL为低电平;读出I2C_SR1之后再写入I2C_DR寄存器将清除BTF位。
1.3.2 从接收器
在接收到地址并清除ADDR后,从接收器将通过内部移位寄存器从SDA线接收到的字节存进DR寄存器。I2C接口在接收到每个字节后都执行下列操作:
- 如果设置了ACK位,则产生一个应答脉冲
- 硬件设置RxNE=1。如果设置了ITEVFEN和ITBUFEN位,则产生一个中断。
如果RxNE被置位,并且在接收新的数据结束之前DR寄存器未被读出,BTF位被置位,在清除BTF之前I2C接口将保持SCL为低电平;读出I2C_SR1之后再写入I2C_DR寄存器将清除BTF位。
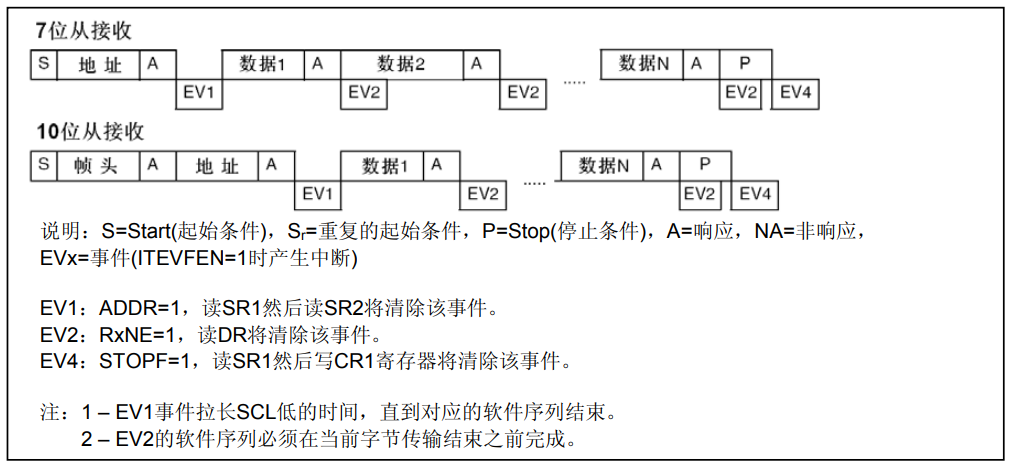
1.3.3 关闭通信
在传输完最后一个数据字节后,主设备产生一个停止条件, I2C接口检测到这一条件时:
- 设置STOPF=1,如果设置了ITEVFEN位,则产生一个中断。
然后I2C接口等待读SR1寄存器,再写CR1寄存器。
1.4 i2c 主模式
在主模式时,I2C接口启动数据传输并产生时钟信号。串行数据传输总是以起始条件开始并以停止条件结束。当通过START位在总线上产生了起始条件,设备就进入了主模式。
以下是主模式所要求的操作顺序:
- 在I2C_CR2寄存器中设定该模块的输入时钟以产生正确的时序;
- 配置时钟控制寄存器;
- 配置上升时间寄存器;
- 编程I2C_CR1寄存器启动外设;
- 置I2C_CR1寄存器中的START位为1,产生起始条件.
1.4.1 起始条件
当BUSY=0时,设置START=1,I2C接口将产生一个开始条件并切换至主模式(M/SL位置位)。
一旦发出开始条件:
- SB位被硬件置位,如果设置了ITEVFEN位,则会产生一个中断。
然后主设备等待读SR1寄存器,紧跟着将从地址写入DR寄存器。
1.4.2 从地址的发送
从地址通过内部移位寄存器被送到SDA线上。
- 在10位地址模式时,发送一个头段序列产生以下事件:
- ADD10位被硬件置位,如果设置了ITEVFEN位,则产生一个中断。然后主设备等待读SR1寄存器,再将第二个地址字节写入DR寄存器。
- ADDR位被硬件置位,如果设置了ITEVFEN位,则产生一个中断。随后主设备等待一次读SR1寄存器,跟着读SR2寄存器。
- 在7位地址模式时,只需送出一个地址字节。一旦该地址字节被送出,
- ADDR位被硬件置位,如果设置了ITEVFEN位,则产生一个中断。随后主设备等待一次读SR1寄存器,跟着读SR2寄存器。
根据送出从地址的最低位,主设备决定进入发送器模式还是进入接收器模式。
- 在7位地址模式时,
- 要进入发送器模式,主设备发送从地址时置最低位为’0’。
- 要进入接收器模式,主设备发送从地址时置最低位为’1’。
- 在10位地址模式时
- 要进入发送器模式,主设备先送头字节(11110xx0),然后送最低位为’0’的从地址。(这里xx代表10位地址中的最高2位。)
- 要进入接收器模式,主设备先送头字节(11110xx0),然后送最低位为’1’的从地址。然后再重新发送一个开始条件,后面跟着头字节(11110xx1)(这里xx代表10位地址中的最高2位。)
TRA位指示主设备是在接收器模式还是发送器模式。
1.4.3 主发送器
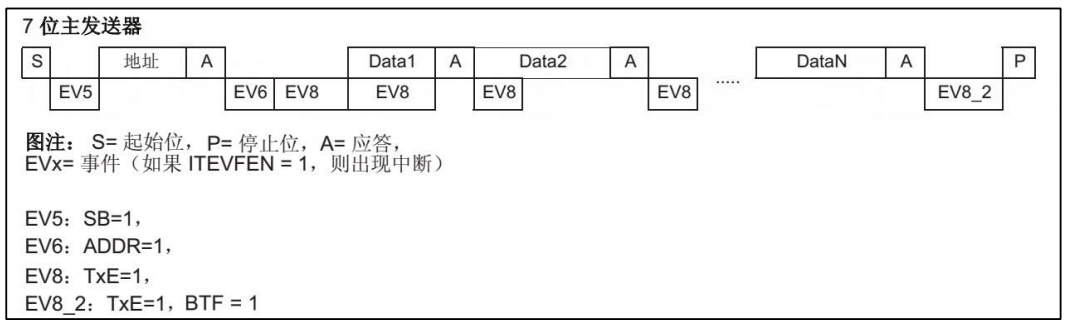
主发送器发送流程及事件说明如下:
- 控制产生起始信号(S),当发生起始信号后,它产生事件“EV5”,并会对 SR1 寄存器的“SB”位置 1,表示起始信号已经发送;
- 紧接着发送设备地址并等待应答信号,若有从机应答,则产生事件“EV6”及“EV8”,这时 SR1 寄存器的“ADDR”位及“TXE”位被置 1,ADDR 为 1 表示地址已经发送,TXE 为 1 表示数据寄存器为空;
- 以上步骤正常执行并对 ADDR 位清零后,我们往 I2C 的“数据寄存器 DR”写入要发送的数据,这时TXE位会被重置0,表示数据寄存器非空,I2C外设通过SDA 信号线一位位把数据发送出去后,又会产生“EV8”事件,即 TXE 位被置 1,重复这个过程,就可以发送多个字节数据了;
- 当我们发送数据完成后,控制 I2C 设备产生一个停止信号(P),这个时候会产生EV8_2 事件,SR1 的 TXE 位及 BTF 位都被置 1,表示通讯结束。
假如我们使能了 I2C 中断,以上所有事件产生时,都会产生 I2C 中断信号,进入同一个中断服务函数,到 I2C 中断服务程序后,再通过检查寄存器位来判断是哪一个事件。
1.4.4 主接收器
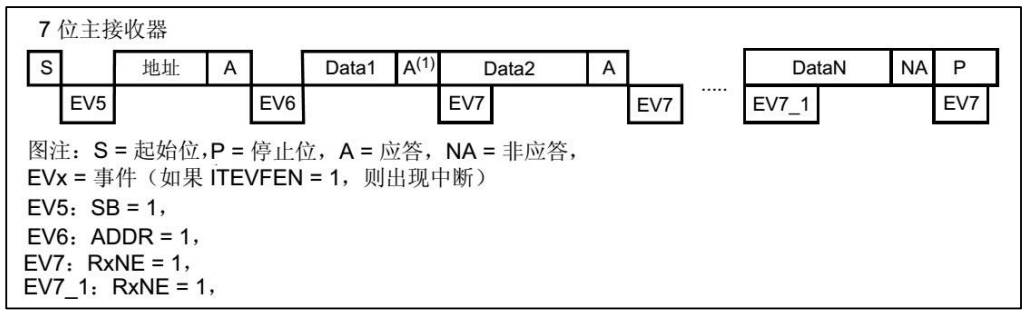
主接收器接收流程及事件说明如下:
- 同主发送流程,起始信号(S)是由主机端产生的,控制发生起始信号后,它产生事件“EV5”,并会对 SR1 寄存器的“SB”位置 1,表示起始信号已经发送;
- 紧接着发送设备地址并等待应答信号,若有从机应答,则产生事件“EV6”这时SR1 寄存器的“ADDR”位被置 1,表示地址已经发送。
- 从机端接收到地址后,开始向主机端发送数据。当主机接收到这些数据后,会产生“EV7”事件,SR1 寄存器的 RXNE被置 1,表示接收数据寄存器非空,我们读取该寄存器后,可对数据寄存器清空,以便接收下一次数据。此时我们可以控制I2C 发送应答信号(ACK)或非应答信号(NACK),若应答,则重复以上步骤接收数据,若非应答,则停止传输;
- 发送非应答信号后,产生停止信号(P),结束传输。
在发送和接收过程中,有的事件不只是标志了我们上面提到的状态位,还可能同时标志主机状态之类的状态位,而且读了之后还需要清除标志位,比较复杂。
1.5 外设逻辑
1.5.1 时钟控制逻辑
SCL 线的时钟信号,由 I2C 接口根据时钟控制寄存器(CCR)控制,控制的参数主要为时钟频率。配置 I2C 的 CCR 寄存器可修改通讯速率相关的参数:
-
可选择 I2C 通讯的“标准/快速”模式,这两个模式分别 I2C 对应 100/400Kbit/s 的通讯速率。
-
在快速模式下可选择 SCL 时钟的占空比,可选 Tlow/Thigh=2 或 Tlow/Thigh=16/9模式,我们知道 I2C 协议在 SCL 高电平时对 SDA 信号采样,SCL 低电平时 SDA准备下一个数据,修改 SCL 的高低电平比会影响数据采样,但其实这两个模式的比例差别并不大,若不是要求非常严格,这里随便选就可以了。
-
CCR 寄存器中还有一个 12 位的配置因子 CCR,它与 I2C 外设的输入时钟源共同作用,产生 SCL 时钟,STM32 的 I2C 外设都挂载在 APB1 总线上,使用 APB1 的时钟源 PCLK1。
通过公式计算结果得出CCR为30,向该寄存器位写入此值则可以控制IIC的通讯速率为400KHz,其实即使配置出来的 SCL 时钟不完全等于标准的 400KHz,IIC 通讯的正确性也不会受到影响,因为所有数据通讯都是由 SCL 协调的,只要它的时钟频率不远高于标准即可。
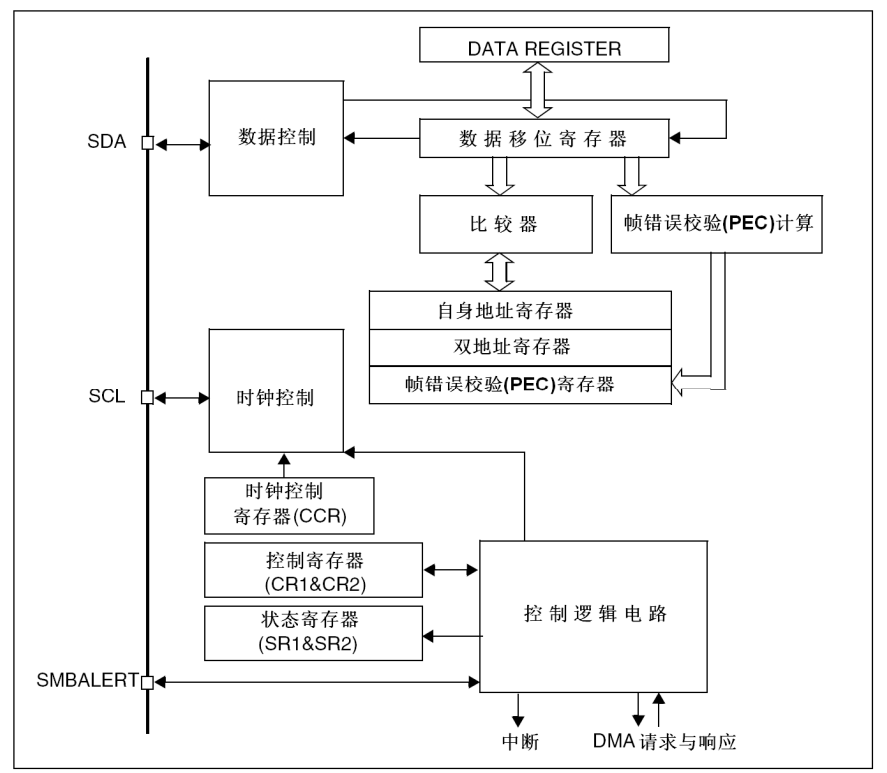
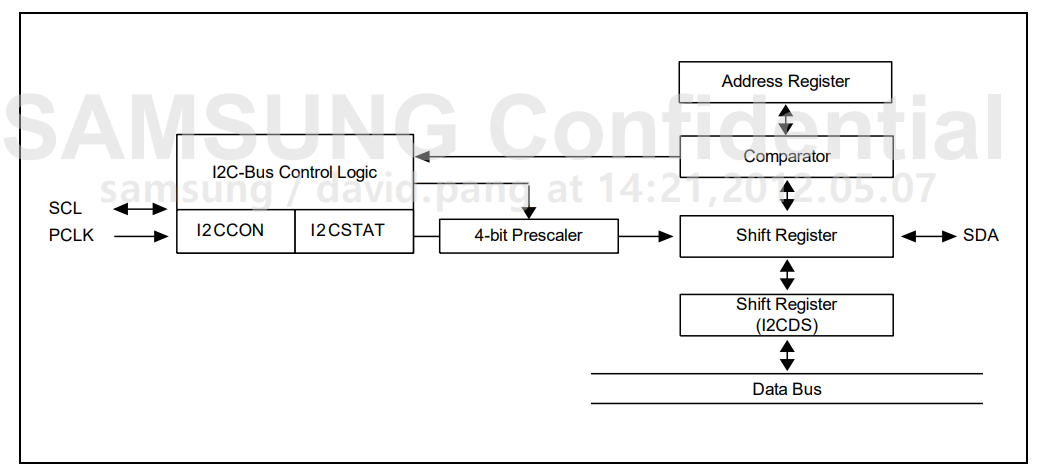
1.5.2 数据控制逻辑
I2C 的 SDA 信号主要连接到数据移位寄存器上,数据移位寄存器的数据来源及目标是数据寄存器(DR)、地址寄存器(OAR)、PEC 寄存器以及 SDA 数据线。当向外发送数据的时候,数据移位寄存器以“数据寄存器”为数据源,把数据一位一位地通过 SDA 信号线发送出去;当从外部接收数据的时候,数据移位寄存器把 SDA 信号线采样到的数据一位一位地存储到“数据寄存器”中。若使能了数据校验,接收到的数据会经过 PCE 计算器运算,运算结果存储在“PEC 寄存器”中。当 STM32 的 I2C 工作在从机模式的时候,接收到设备地址信号时,数据移位寄存器会把接收到的地址与 STM32 的自身的“I2C 地址寄存器”的值作比较,以便响应主机的寻址。STM32 的自身 I2C 地址可通过修改“自身地址寄存器”修改,支持同时使用两个 I2C 设备地址,两个地址分别存储在 OAR1 和 OAR2 中。
1.5.3 整体控制逻辑
整体控制逻辑负责协调整个 I2C 外设,控制逻辑的工作模式根据我们配置的“控制寄存器(CR1/CR2)”的参数而改变。在外设工作时,控制逻辑会根据外设的工作状态修改“状态寄存器(SR1 和 SR2)”,我们只要读取这些寄存器相关的寄存器位,就可以了解 I2C的工作状态。除此之外,控制逻辑还根据要求,负责控制产生 I2C 中断信号、DMA 请求及各种 I2C 的通讯信号(起始、停止、响应信号等)。
2. Samsung
Samsung Exynos 4412:
CPU: ARM Cortex-A9 * 4, 32 bit.
2.1 Overview
要控制多主i2c总线操作,必须将值写入这些寄存器:
- 多主 I2C 总线控制寄存器 – I2CCON
- 多主 I2C 总线控制/状态寄存器 – I2CSTAT
- 多主 I2C 总线 Tx/Rx 数据移位寄存器 – I2CDS
- 多主机 I2C 总线地址寄存器 – I2CADD
如果i2c总线空闲,则SDA和SCL线都应该处于高电平。SDA从高到低的转换将启动所有启动条件。SDA从低到高的转换启动一个停止条件,而SCL保持稳定在高电平。
放在SDA线上的每个数据字节总共应该是8位。在总线传输操作期间,发送或接收字节没有限制。12C主设备和从设备总是首先从最高有效位(MSB)发送数据,然后在每个字节之后立即发送确认位(ACK)。
- 9 通道多主、从 I2C 总线接口(8 通道通用,1 通道专用于高清多媒体接口 (HDMI)。)。
- 7位寻址模式。
- 串行、8 位、双向数据传输。
- 标准模式下支持高达 100 kbit/s。
- 在快速模式下支持高达 400 kbit/s。
- 支持主发送、主接收、从发送和从接收操作。
- 支持中断或轮询事件。
Exynos 4412 SCP I2C 总线接口的四种操作模式是:
- 主机发送模式
- 主机接收模式
- 从机发送模式
- 从机接收模式
2.2 Bus Arbitration Procedures
仲裁发生在 SDA 线上,以防止两个主设备之间的总线冲突。 如果一个SDA高电平的主机检测到另一个SDA低电平有效的主机,它不会发起数据传输。 这是因为总线上的当前电平不对应于发起数据传输。 仲裁程序一直持续到 SDA 线变为高电平为止。
当两个或多个主设备同时将 SDA 线置为低电平时,每个主设备都会评估自己是否具有主控权。 为了评估的目的,每个主机检测地址位。 当每个主机生成从机地址时,它会检测 SDA 线上的地址位。 这是因为 SDA 线变为低电平而不是高电平。
让我们假设一个主机生成低电平作为第一个地址位,而另一个主机保持高电平。 在这种情况下,两个主机都会检测到总线上的低电平。 这是因为低状态的权力优于高状态。 当这种情况发生时,生成主控的低位(作为地址的第一位)获得主控权,而生成主控的高位(作为地址的第一位)撤回主控权。
当两个主机都产生低电平作为地址的第一位时,再次对第二个地址位进行仲裁。 该仲裁持续到最后一个地址位的末尾。
2.3 Configuring I2C-Bus
要控制 SCL 的频率,应将 4 位预分频器值写入 I2CCON 寄存器。 I2C 总线接口地址存储在 I2C 总线地址 (I2CADD) 寄存器中。 默认情况下,I2C 总线接口地址具有未知值。
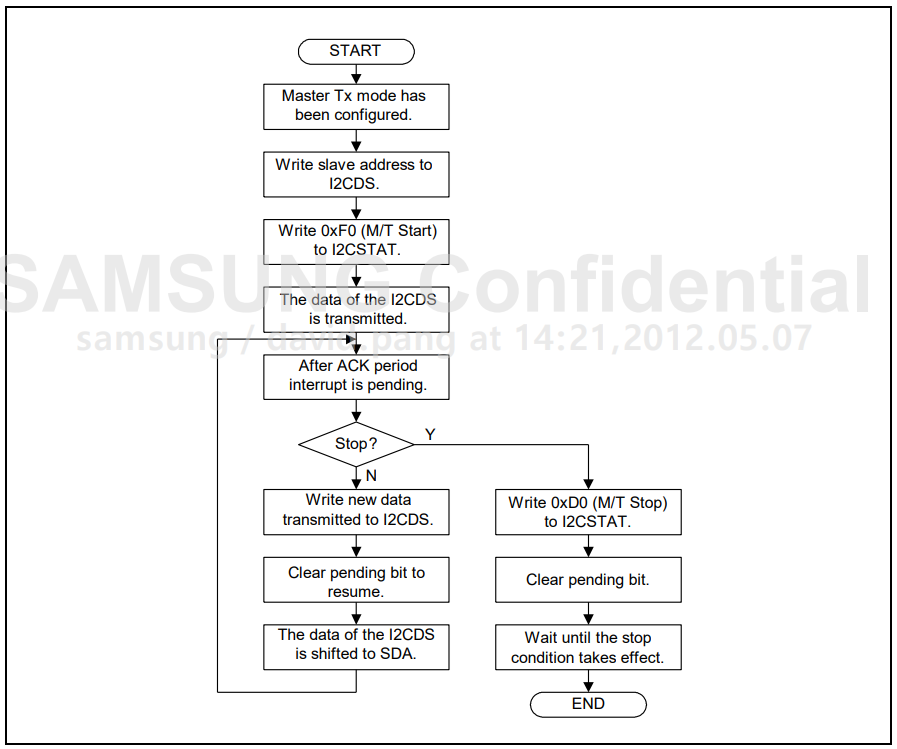
Master/Transmitter Mode:
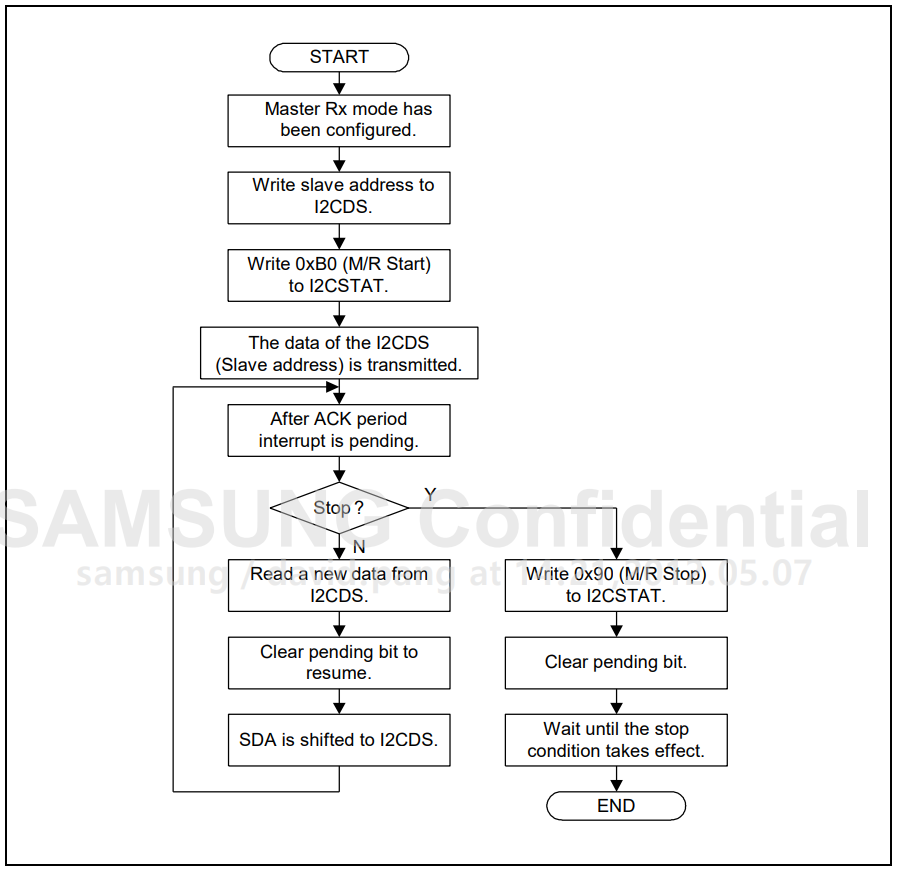
Master/Receiver Mode:
Slave/Transmitter Mode:
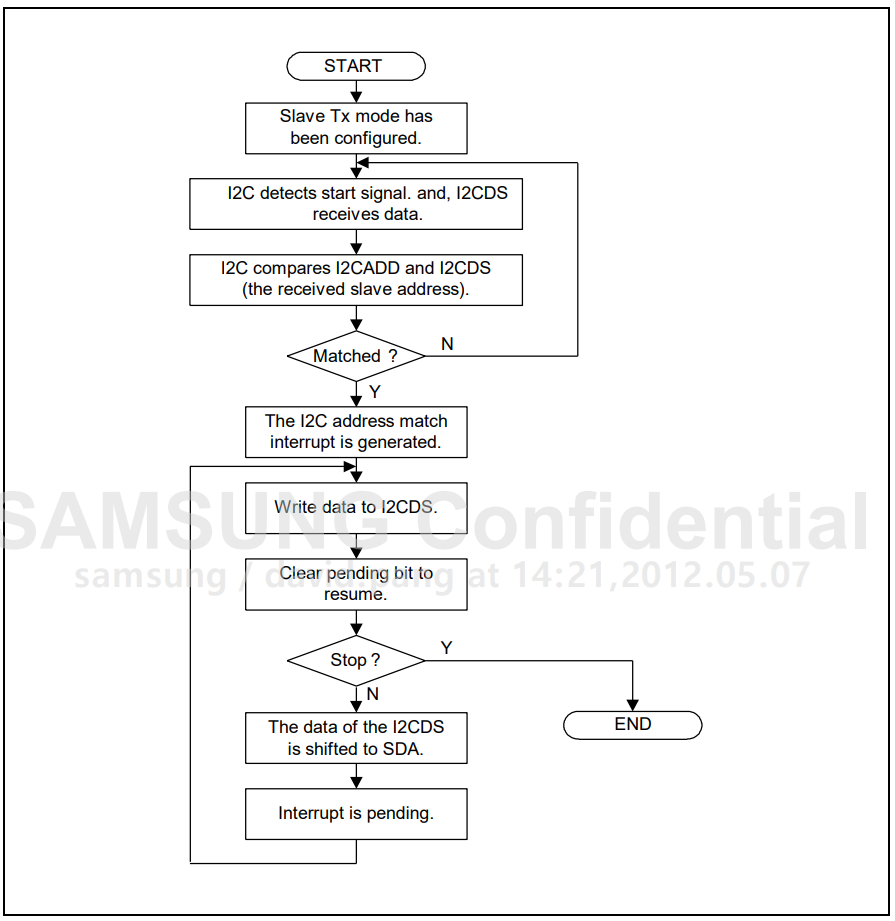
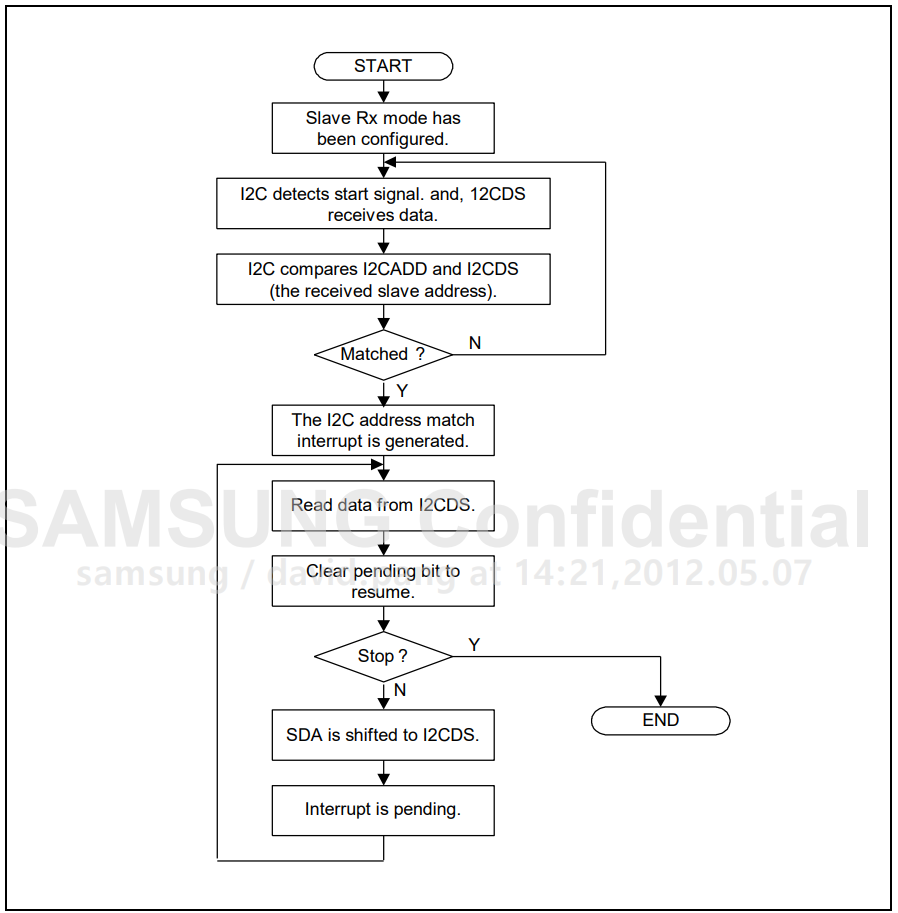
Slave/Receiver Mode:
3. RockChip
RockChip RK3588:
CPU: ARM Cortex-A76 * 4 + ARM Cortex-A55 * 4, 64 bit。
3.1 Overview
内部集成电路(I2C)是一种双线(SCL和SDA)双向串行总线,它提供了一种高效和简单的设备间信息交换方法。该I2C总线控制器只支持主模式,作为AMBA协议和通用I2C总线系统之间的桥梁。
- 支持9个独立I2C:I2C0~8,具有42对IO。
- 项目与 I2C 总线兼容。
- AMBA APB 从机接口。
- 支持I2C总线主模式。
- 软件可编程时钟频率和传输速率高达 400Kbit/秒。
- 支持7位和10位寻址模式。
- 中断或轮询驱动的多字节数据传输。
- 时钟延长和等待状态生成。
- 滤除 SCL 和 SDA 上的毛刺。
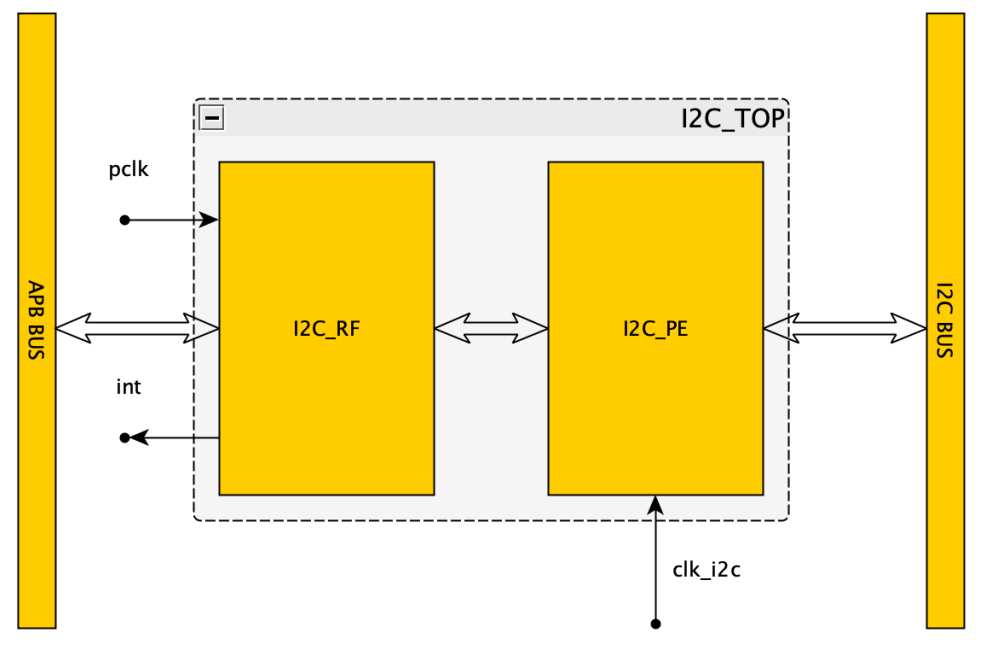
I2C_RF
I2C_RF 模块用于通过带有 APB 接口的主机控制 I2C 控制器的操作。 它实现了寄存器设置和中断功能。 I2C_RF 组件与 pclk 同步运行。
I2C_PE
I2C_PE 模块实现 I2C 主设备操作,用于向其他 I2C 设备发送数据和从其他 I2C 设备接收数据。 I2C 主控制器与 clk_i2c 同步运行。
I2C_TOP
I2C_TOP模块是I2C控制器的顶层模块。
3.2 Initialization
I2C 控制器基于 AMBA APB 总线架构,通常是 SOC 的一部分。 因此,在 I2C 运行之前,必须先确认一些系统设置和配置,其中包括:
-
I2C中断连接类型:应考虑CPU中断方案。 如果I2C中断连接到额外的中断控制器模块,我们需要确定INTC向量。
-
I2C 时钟速率:I2C 控制器使用 APB 时钟来配置控制器,并使用 clk_i2c 作为工作时钟。 正确的寄存器设置取决于系统要求。
3.3 Master Mode Programming
- SCL Clock
当 I2C 控制器编程为主模式时,SCL 频率由 I2C_CLKDIV 寄存器确定。 SCL频率由以下公式计算:
SCL Divisor = 8*(CLKDIVL + 1 + CLKDIVH + 1); clk_i2c = 100MHz~200MHz.
SCL = clk_i2c/ SCLK Divisor.
- Data Receiver Register Access
当 I2C 控制器接收到 MRXCNT 字节数据时,CPU 可以通过寄存器 RXDATA0 ~ RXDATA7 获取数据。 控制器在一次事务中最多可以接收 32 字节的数据。
当 MRXCNT 寄存器被写入时,I2C 控制器将开始驱动 SCL 接收数据。
- Transmit Transmitter Register
要发送的数据由CPU写入TXDATA0~7。 控制器在一次事务中最多可以传输 32 字节的数据。 低字节将首先被传输。
当 MTXCNT 寄存器被写入时,I2C 控制器将开始发送数据。
- Start Command
向 I2C_CON[3] 写入 1,控制器将发送 I2C 启动命令。
- Stop Command
向 I2C_CON[4] 写入 1,控制器将发送 I2C 停止命令。
-
I2C Operation mode
i2c 有四种操作模式。
- 当 I2C_CON[2:1] 是 2’b00, 控制器将 TXDATA0~TXDATA7 中的所有有效数据逐字节发送。 控制器将首先发送低字节。
- 当 I2C_CON[2:1] 是 2’b01, 控制器将首先发送 MRXADDR 中的设备地址(写/读位 = 0),然后发送 MRXRADDR 中的设备寄存器地址。 之后,控制器将发出重启信号并重新发送 MRXADDR(写/读位 = 1)。 最后,控制器进入接收模式。
- 当 I2C_CON[2:1] 是 2’b10, 控制器处于接收模式,将触发时钟读取MRXCNT字节数据。
- 当 I2C_CON[2:1] 是 2’b11, 控制器将首先发送 MRXADDR 中的设备地址(写/读位 = 1),然后发送 MRXRADDR 中的设备寄存器地址。 之后,控制器将发出重启信号并重新发送 MRXADDR(写/读位 = 1)。 最后,控制器进入接收模式。
-
Read/Write Command
- 当 I2C_OPMODE(I2C_CON[2:1]) 是 2’b01 或 2’b11, 读/写命令位由控制器本身决定。
- 在仅 RX 模式下(I2C_CON[2:1] 是 2’b10),读/写命令位由 MRXADDR[0] 决定。
- 在仅 TX 模式下(I2C_CON[[2:1] 是 2’b00),读/写命令位由 TXDATA[0] 决定。
-
Master Interrupt Condition
I2C_ISR寄存器中有7个与主机模式相关的中断位。
- 字节传输完成中断(位 0):当主机完成传输一个字节时,该位被置位。
- 字节接收完成中断(位 1):当主机完成接收字节时,该位被置位。
- MTXCNT 字节数据传输完成中断(位 2):当主机完成传输 MTXCNT 字节时,该位被置位。
- MRXCNT 字节数据接收完成中断(位 3):当主设备完成接收 MRXCNT 字节时,该位被置位。
- 启动中断(位 4):当主机完成向 I2C 总线发出启动命令时,该位被置位。
- 停止中断(位 5):当主机完成向 I2C 总线发出停止命令时,该位被置位。
- NAK 接收中断(位 6):当主设备收到 NAK 握手时,该位被置位。
-
Last byte acknowledge control
- 如果 I2C_CON[5] 为 1,则当在仅 RX 模式下接收到最后一个字节时,I2C 控制器将向从机发送 NAK 握手。
- 如果 I2C_CON[5] 为 0,则当在仅 RX 模式下接收到最后一个字节时,I2C 控制器将向从机发送 ACK 握手。
-
How to handle NAK handshake received
- 如果 I2C_CON[6] 为 1,I2C 控制器将在收到 NAK 握手时停止所有事务。 并且软件应该负责处理这个问题。
- 如果 I2C_CON[6] 为 0,I2C 控制器将忽略收到的所有 NAK 握手。
-
I2C controller data transfer waveform
- Bit transferring
- Data Validity
SDA线在SCL高电平期间必须保持稳定,并且只有当SCL处于低电平状态时才能更改SDA线上的数据。
- START and STOP conditions
当 SDA 变低而 SCL 处于高电平期间,启动条件发生。 当 SDA 线变高且 SCL 处于高状态时,将生成停止条件。
-
Data transfer
- Acknowledge
一个字节的数据传输后(时钟标记为1~8),在第9个时钟接收器必须在SDA线上断言ACK信号,如果接收器将SDA线拉至低电平,则表示“ACK”,反之,则表示“ 不确认”。
- Byte transfer
主设备自己的 I2C 总线可能会发起多字节传输到从设备。 传输从“START”命令开始,以“STOP”命令结束。 每次传输字节后,接收器必须向发送器回复 ACK。
- Bit transferring